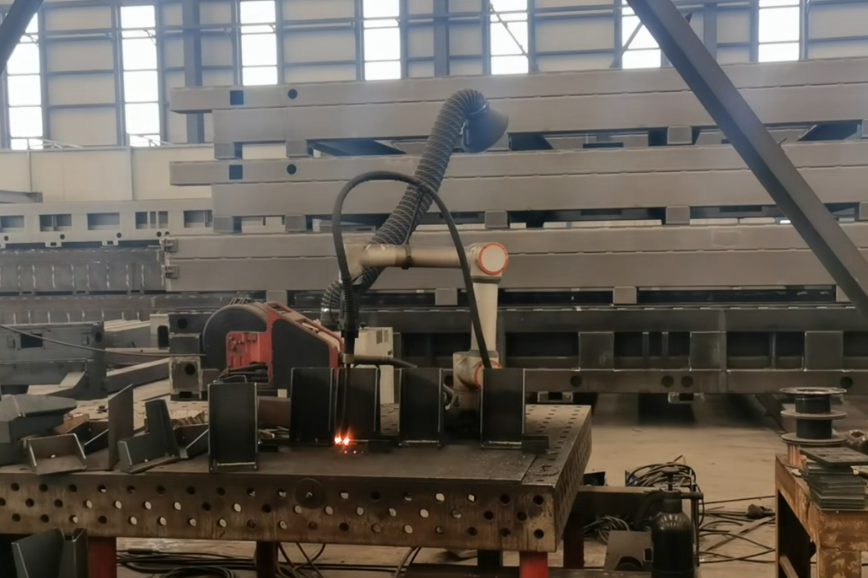
床身与地脚是激光设备的核心支撑结构,其焊接精度、强度直接决定设备的稳定性与加工精度。传统人工焊接存在热输入大、变形难控、一致性差、效率低下等痛点,而登兰普协作机器人焊接完美解决了这些问题。它通过高精度重复定位与柔性姿态控制,适配地脚复杂坡口与多角度焊缝,焊接变形可控制在 0.3mm 以内,确保床身装配基准的精度保持。
登兰普协作机器人支持拖动示教与快速编程,15 分钟内即可完成新工件调试,换产效率较人工提升 70% 以上。搭配焊缝寻位与视觉跟踪系统,可自动补偿装夹偏差,实现免示教智能焊接,大幅降低对操作人员的技能依赖。焊接过程采用低热量输入工艺,焊缝成形美观、强度达标,且残余应力低,无需大规模退火矫正,有效减少后续工序成本。
该方案无需安全围栏,可与人协同作业,车间占地减少 30%,同时全程自动化焊接,避免了人工焊接的烟尘、弧光危害。对比传统工艺,焊接效率提升 5-10 倍,良品率稳定在 99% 以上,人力成本降低 60%,广泛应用于激光切割机、机床等重型装备制造,实现了床身地脚焊接的高精度、高稳定、高柔性智能化生产。